Computer Vision Modelling — “Gaia”
On the UCL East campus hangs Gaia, a large-scale globe approximately 7.6 metres in diameter suspended in the foyer. Due to air drafts from the main doors, the globe continuously swings and rotates. The goal of this project was to model its dynamics using only a single Pi camera and computer vision methods — without direct sensors or mechanical measurements.

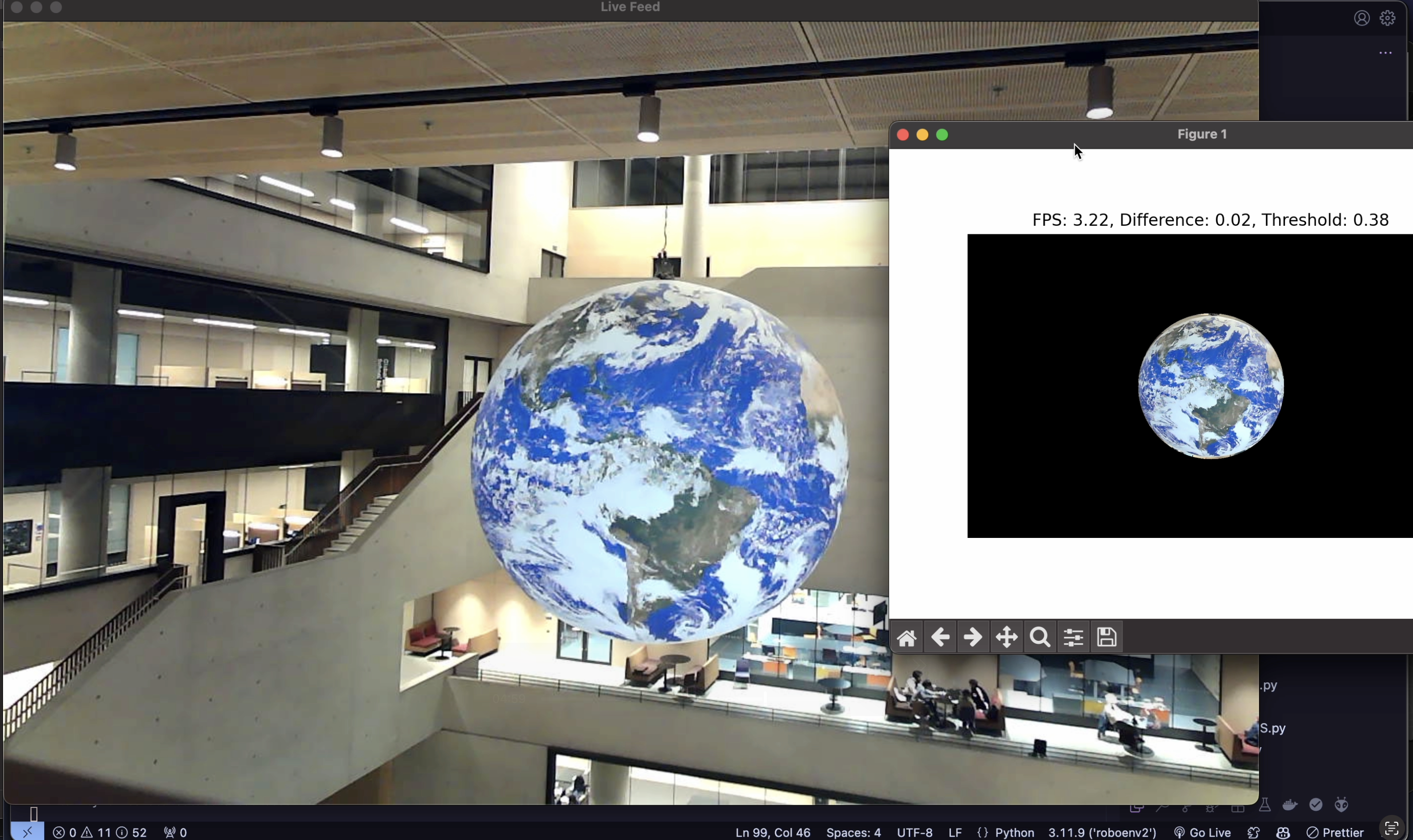
Task 1 — Object Segmentation
The first challenge was to segment the globe (the “AO”, or Earth-like object) from the background across varying lighting conditions. Several approaches were tested, including HSV colour thresholding, Hough Circle Transform, and a combined contour-based method.
The final hybrid technique used HSV thresholding to isolate colour regions, followed by contour extraction and circle fitting, which proved both accurate and efficient under changing light and reflections.


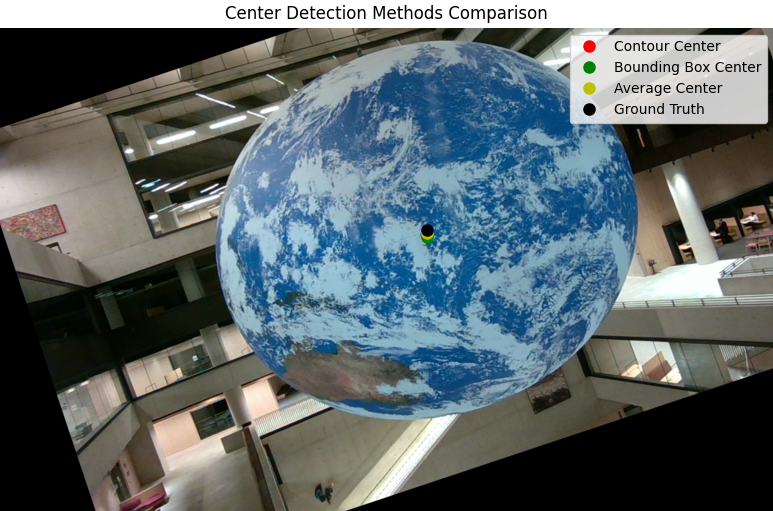
Task 2 — Centre Tracking and Swing Dynamics
Next, the focus shifted to tracking the globe’s centre to measure its swing pattern. Multiple geometric methods were compared, including bounding boxes, contour means, and minimum enclosing circles, with the latter providing the most consistent results.
Tracking over time revealed that the globe’s motion followed a rotating elliptical path, rather than a simple one-dimensional swing — a behaviour confirmed through feature-based analysis using SIFT.
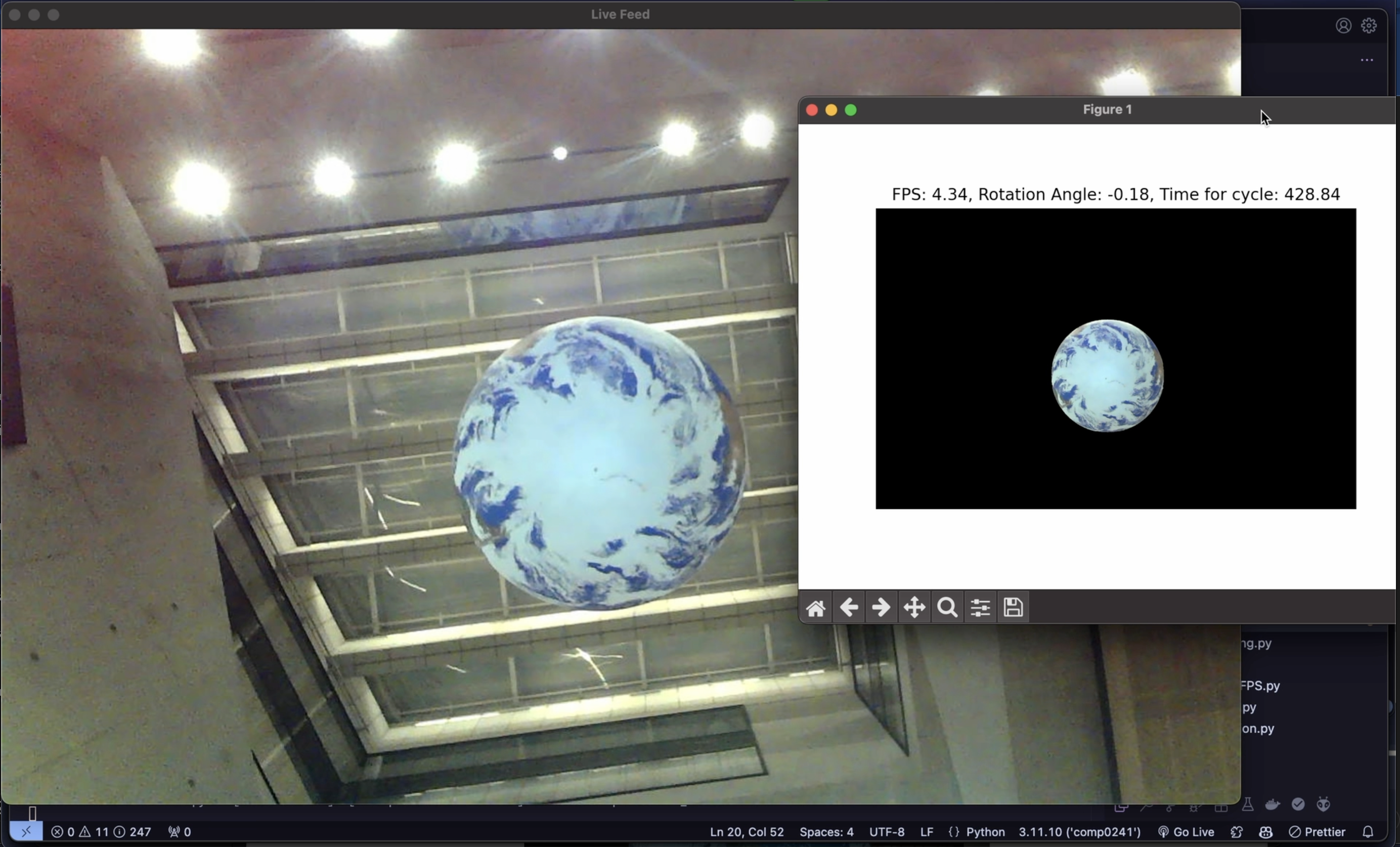
Task 3 — Rotation Estimation
To measure the rotation period, two approaches were tested:
- A side-view method that compared frame similarity using feature matching.
- A ground-view method that computed angular displacement between frames.
Both techniques produced accurate and comparable results, confirming that the globe’s rotation is not constant, but varies due to torque effects in its suspension cable.
Real-time estimation was attempted, though limited by the computational cost of SIFT.
Task 4 — Surface Velocity and Scale Calibration
The final task aimed to estimate surface velocity using visual tracking and scale calibration.
By combining depth data from a RealSense D455 and geometric projection, the true globe diameter was established at 7.603 m.
Feature tracking between consecutive frames produced velocity estimates, revealing that swing-induced motion dominated surface readings, highlighting the challenge of isolating rotational effects in dynamic conditions.
💡 Key Takeaways
- Applied colour segmentation, feature matching, and stereo geometry to model physical motion from video alone.
- Demonstrated how computer vision can extract dynamic behaviour without direct sensors.
- Identified key limitations in real-time computation using SIFT and proposed ORB as a faster alternative.
- Gained practical insight into motion tracking, camera calibration, and error analysis for vision-based modelling.